👤 个人信息
🎓 香港科技大学电子与计算机工程专业 (CPEG), 2023-2027
🤖 3 年 RoboMaster 参赛经历 (香港科技大学 ENTERPRIZE 战队) — 2025 赛季机械组组长,获工程全明星称号,创 4 级矿石 5.8s 最短兑换纪录。
机械设计与制造
- SOLIDWORKS 复杂机构综合设计与结构优化
- AutoCAD、Fusion 360
- 3D 打印、CNC 加工、气动系统
- 两年高精度装配经验
嵌入式与软件开发
- Python、MATLAB 脚本与数据处理
- STM32、C/C++ 嵌入式开发
⚙ 个人项目
🤖RoboMaster 2025 工程机器人
机械组组长 · 工程全明星 · 5.8s 破纪录采矿速度

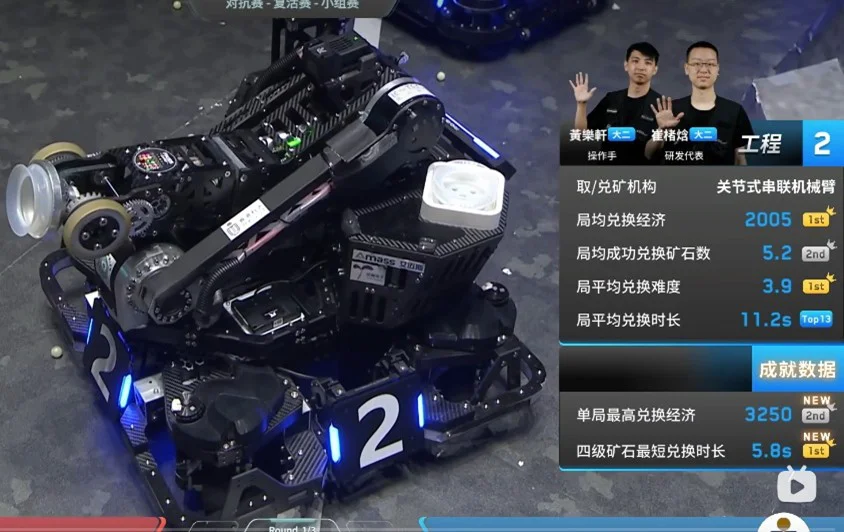
🏆 实现 5.8s 破纪录采矿速度,入选 2025 赛季全明星阵容
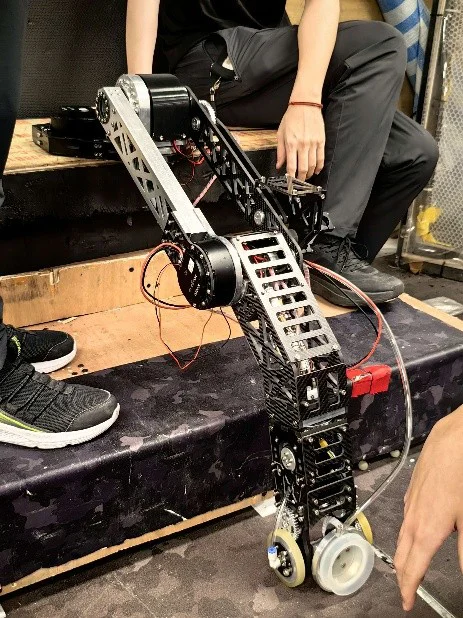
🛠 高性能六轴机械臂系统
- 负载:末端有效负载逾 30kg,同级别领先作业半径
- 鲁棒性:半年高强度实战中零重大结构损伤,模块化设计支持快速迭代
- 精度:高刚性臂体 + 精密传动补偿,确保重复定位精度
🚘 全向驱动底盘
- 电动车橡胶轮,兼顾极高地面抓地力与减震性能
- 自研气缸悬挂舵轮结构,大幅提升机械臂底座稳定性
💨 气动系统
- 自主改装高流量气泵,流量精准可调
- 电机电流/位置反馈实现吸附状态实时监测
🛠 综合机构与工业设计
- 综合运用齿轮、连杆、链条及同步带等多种传动
- 工业级管线管理,多自由度下走线安全与视觉美感
🎮自定义控制器(高精度遥操作)
人机交互 · 六轴联动 · 低成本高精度

🎯 作为核心输入终端,与工程机器人深度耦合,支撑创纪录作业效率
👋 人机交互与人体工学
- 与主机械臂高度同构的六轴联动结构,实现 1:2 直觉映射
- 手部抓握轻量化设计,长时操作舒适精准
💰 高性价比结构方案
- 大量 3D 打印 + 简易 3 轴 CNC 加工,显著降低成本
- 桌面级尺寸,低运动惯量,提供丝滑操控反馈
🤖RoboMaster 2024 英雄机器人
双极摩擦轮 · 自适应悬挂底盘 · 全向移动

🎯 高一致性双极摩擦轮发射系统
- 10m 散布 < 25×25cm,初速波动 ±0.1m/s
- 双极对冲摩擦轮机构,实现极窄散布
📿 高可靠性连续供弹机构
- 防卡死拨弹结构,支持 2Hz 恒定频率稳定供弹
- 弹丸尺寸公差容错,显著降低卡死率
🏃 自适应麦克纳姆轮悬挂底盘
- 全维度灵巧位移与快速转场
- 通过 30cm 垂直跌落高强度冲击测试
🦾四轴手臂外骨骼(课设)
穿戴式动力辅助 · DH 参数建模 · IMU 跟随控制

🧠 面向人机协同作业场景的穿戴式动力辅助设备,4 自由度轻量化外骨骼原型机
🔬 运动学建模
- 基于 DH 参数法建立外骨骼运动学模型
- 仿真环境下验证工作空间覆盖率
🏃 算法控制
- 跟随模式:IMU 预测手臂移动方向并跟随
- 助力模式:闭环控制电机保持动作,提供辅助力
📚 重要研发方案
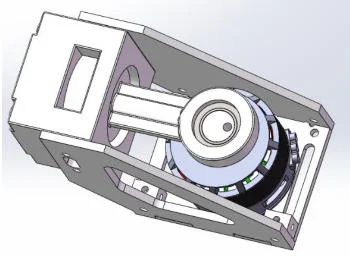
🧱六轴机械臂结构
末端执行器核心设计 · 多场耦合传输 · 高精度传动
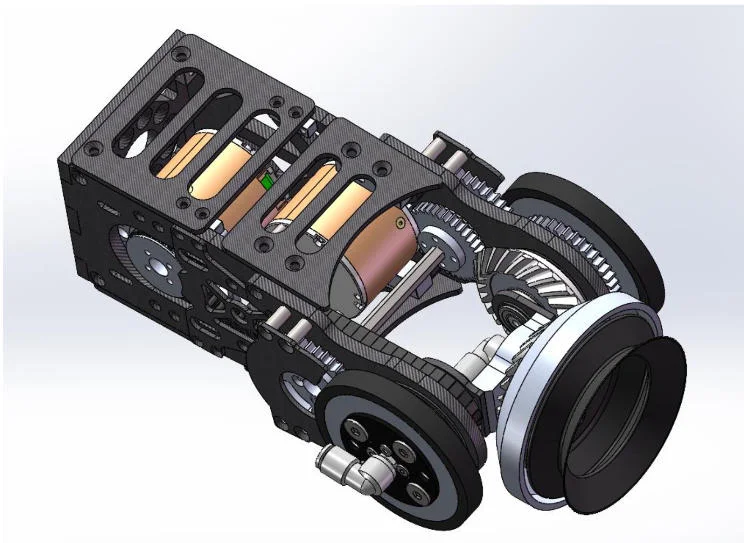
🌀 "轮手"一体化末端
- 集主动轮与气动吸盘于一体,抓取与移动功能自由切换
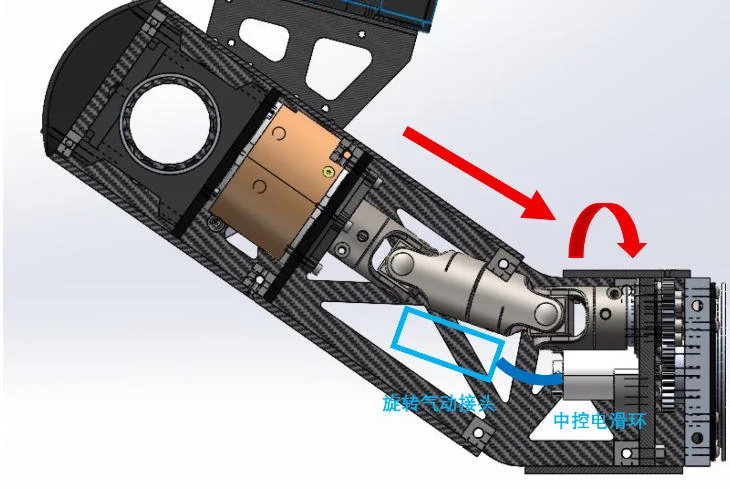
🔌 多场耦合传输设计
- 电滑环 + 中空旋转气动接头嵌套,解决 J4 关节无限旋转绕线
📏 空间极简化布局
- 万向轴传动 + 电机后置 L4,压缩末端体积适配矿槽尺寸
🎯 高精度传动集成
- J5/J6 等速同步轮 + 齿轮组 + 锥齿轮,J5 近乎零背隙
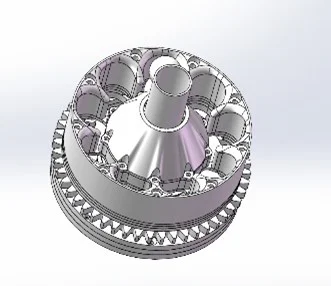
💨改装气泵
高性能二次开发 · 真空度 -85kPa · 流量 40L/min
⚡ 将低端气泵电机改装为 3508 直流无刷电机驱动,维持 -85kPa 高真空度的同时实现 40L/min 大流量输出
🔧 改装方案
- 3508 直流无刷电机替换原低端电机,大幅提升性能
- 电机电流反馈实时感知吸盘吸附状态,以极低成本实现类气压计检测
🛠多种舵轮模组
高负载悬挂 · 小型化轻量化 · 全向机动

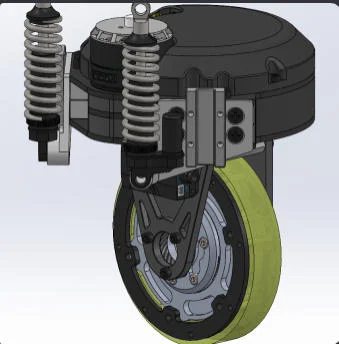
💪 高负载、高平稳度、高机动性
- 宽大橡胶胎 + 高抓地力 + 减震能力
- 四个 MGN7 滑块与气弹簧组成舵下悬挂,承受高负载
🥬 小型化、轻量化
- 3508 电机本体 + 齿轮传动 + 光电门位置校准
- 轻型聚氨酯轮,舵上悬挂进一步减少体积
🎲两种供弹系统
大弹丸侧供弹 2Hz · 小弹丸中心供弹 25Hz+

🚀 大弹丸侧供弹
- 用于 2024 英雄机器人,多轮结构优化
- 类高尔夫球弹丸稳定 2Hz 供弹不卡顿
💣 小弹丸中心供弹
- 用于步兵、哨兵、无人机,结构小巧轻便
- 17mm 弹丸 25Hz 以上高效供弹